Pyslvs API¶
Namespace¶
The namespace of Pyslvs is pyslvs.
The modules are:
atlasbfgscollectionexampleexpressionexpression_parsergraphgraph_layoutnumberplanar_checkplanar_linkagetinycadlibtriangulationverify
Module atlas¶
conventional_graph()¶
| cg_list | c_j_list | no_degenerate | stop_func | return |
|---|---|---|---|---|
| List[Graph] | Sequence[int] | int | Optional[Callable[[], bool]] | List[Graph] |
| None |
Generate conventional graphs by contracted graphs cg_list and
contracted link assortment c_j_list.
The degenerate setting no_degenerate has following option:
0: No degenerate.1: Only degenerate.- Else: All graphs.
The check stop function stop_func object for GUI or subprocess,
return True to terminate this function.
contracted_graph()¶
| link_num | stop_func | return |
|---|---|---|
| Sequence[int] | Optional[Callable[[], bool]] | List[Graph] |
| None |
Generate contracted graphs by link assortment link_num.
The check stop function stop_func object for GUI or subprocess,
return True to terminate this function.
Module bfgs¶
SolverSystem¶
| type | inherit |
|---|---|
| type | object |
Sketch Solve solver.
Note
The object attributes of such type are unable to access.
SolverSystem.__init__()¶
| self | vpoints | inputs | data_dict | return |
|---|---|---|---|---|
| Sequence[VPoint] | Optional[Dict[Tuple[int, int], float]] | Optional[Dict[Union[int, Tuple[int, int]], Union[Coordinate, float]]] | None | |
| None | None |
The expression vpoints solver function of BFGS method by
giving the input pairs inputs and link length data_dict requirements.
Note
The format of input pairs:
- Revolut joints:
{(base, driver): angle} - Slider joints:
{(base, base): offset}
The format of data_dict:
- Specific coordinates: Dict[int, Coordinate]
- Specific link length: Dict[Tuple[int, int], float]
The data_dict parameter will reformat its keys into frozenset type.
SolverSystem.show_inputs()¶
| self | return |
|---|---|
| FrozenSet[Tuple[int, int]] |
Show the current input pairs keys from original constructor.
SolverSystem.show_data()¶
| self | return |
|---|---|
| FrozenSet[Union[int, Tuple[int, int]]] |
Show the current keys of data_dict parameter from original constructor.
SolverSystem.set_inputs()¶
| self | inputs | return |
|---|---|---|
| Dict[Tuple[int, int], float] | None |
Set the values of inputs parameter from original constructor.
Two groups of dict keys must be the same or subset.
SolverSystem.set_data()¶
| self | data_dict | return |
|---|---|---|
| Dict[Union[int, Tuple[int, int]], Union[Coordinate, float]] | None |
Set the values of data_dict parameter from original constructor.
Two groups of dict keys must be the same or subset.
SolverSystem.solve()¶
| self | return |
|---|---|
| List[Union[Tuple[float, float] Tuple[Tuple[float, float], Tuple[float, float]]]] |
Solve the conditions and return the result, raise ValueError if not succeeded. The joint position will returned by its index correspondingly.
- Revolut joints: Tuple[float, float]
- Slider joints: Tuple[Tuple[float, float], Tuple[float, float]]
Module collection¶
collection_list¶
| type |
|---|
| Dict[str, Dict[str, Any]] |
The example data of collections.
The format of each configuration is:
Expression: Mechanism expression of the structure.- type: str
input: [Input pairs].- type: Sequence[Tuple[int, int]]
Graph: The generalized chain graph in edge set.- type: Sequence[Tuple[int, int]]
Placement: The grounded joints setting. (x,y,r)- type: Dict[int, Optional[Tuple[float, float, float]]]
Target: The target joints settings.- type: Dict[int, Optional[Sequence[Tuple[float, float]]]]
cus: The custom joints on specific link. (link number correspond to the graph expression.)- type: Dict[int, int]
same: The multiple joints setting.- type: Dict[int, int]
Module efd¶
efd_fitting¶
| path | n | return |
|---|---|---|
| Sequence[Tuple[float, float]] | int | ndarray |
Curve fitting using Elliptical Fourier Descriptor.
The path path will be translate to Fourier descriptor coefficients,
then regenerate a new paths as a n x 4 NumPy array.
Module example¶
example_list¶
| type |
|---|
| Dict[str, Tuple[str, Sequence[Tuple[int, int]]]] |
The example data of mechanisms.
The format of each mechanism is:
[0]: Mechanism expression.- type: str
[1]: [Input pairs].- type: Tuple[Tuple[int, int], …]]
Module expression¶
get_vlinks()¶
| vpoints | return |
|---|---|
| Iterable[VPoint] | List[VLink] |
Get VLinks from a list of VPoint vpoints.
Coordinate¶
| type | inherit |
|---|---|
| type | object |
A data class used to store coordinates.
Object attributes of Coordinate¶
| name | type | description |
|---|---|---|
| x | float | The x value of Coordinate class. |
| y | float | The y value of Coordinate class. |
Coordinate.__init__()¶
| self | x | y |
|---|---|---|
| float | float |
The constructor of Coordinate class.
Coordinate.distance()¶
| self | p | return |
|---|---|---|
| Coordinate | float |
Return the distance between two Coordinate objects.
Coordinate.is_nan()¶
| self | return |
|---|---|
| bool |
Return True if the coordinate value is not a number.
Coordinate.__repr__()¶
| self | return |
|---|---|
| str |
Over loaded method to print the objects.
VJoint¶
| type | inherit |
|---|---|
| type | IntEnum |
Enumeration values of Joint types.
VPoint¶
| type | inherit |
|---|---|
| type | object |
Mechanism expression class.
Class attributes of VPoint¶
| name | type | description |
|---|---|---|
| HOLDER | VPoint | A placeholder of VPoint type. |
Object attributes of VPoint¶
| name | type | description |
|---|---|---|
| links | Sequence[str] | Link list of the joint. |
| c | Tuple[Tuple[float, float], Tuple[float, float]] | Current coordinates of the joint. |
| type | VJoint | The type of the joint. |
| type_str | str | The type string of the joint. |
| color | Optional[Tuple[int, int, int]] | The RGB color data of the joint. |
| color_str | str | The color string of the joint. |
| x | float | The original x value of the joint. |
| y | float | The original y value of the joint. |
| angle | float | The slider slot angle value of the joint. |
VPoint.__init__()¶
| self | links | type_int | angle | color_str | x | y | color_func | return |
|---|---|---|---|---|---|---|---|---|
| Iterable[str] | VJoint | float | str | float | float | Optional[Callable[[str], Tuple[int, int, int]] | None | |
| None |
The attributes will match to the object attributes of VPoint objects.
Where the color function color_func needs to transform the color string color_str into RGB format.
If color information is not needed, the color_func can be None.
Note
Some of the attributes are not work in some of the joint types.
VPoint.r_joint()¶
@staticmethod
| links | x | y | return |
|---|---|---|---|
| Iterable[str] | float | float | VPoint |
A fast constructor of revolut joints.
VPoint.slider_joint()¶
@staticmethod
| links | type_int | angle | x | y | return |
|---|---|---|---|---|---|
| Iterable[str] | VJoint | float | float | float | VPoint |
A fast constructor of slider joints.
VPoint.copy()¶
| self | return |
|---|---|
| VPoint |
The copy method of the VPoint object.
VPoint.cx()¶
@property
| self | return |
|---|---|
| float |
X value of current coordinate. If it’s slider, the pin coordinate will be returned.
VPoint.cy()¶
@property
| self | return |
|---|---|
| float |
Y value of current coordinate. If it’s slider, the pin coordinate will be returned.
VPoint.set_links()¶
| self | links | return |
|---|---|---|
| Iterable[str] | None |
The update function of links attribute.
VPoint.replace_link()¶
| self | link1 | link2 | return |
|---|---|---|---|
| str | str | None |
Replace the value in links attribute.
VPoint.move()¶
| self | c1 | c2 | return |
|---|---|---|---|
| Tuple[float, float] | Optional[Tuple[float, float]] | None | |
| None |
The update function of current coordinate(s). The 2nd placement is the pin coordinate of slider joints.
If there is only one argument for a slider joint, the slot and pin coordinates will be set to the same position.
VPoint.locate()¶
| self | x | y | return |
|---|---|---|---|
| float | float | None |
The update function of original coordinate.
It will call self.move((x, y)) after set the position.
VPoint.rotate()¶
| self | angle | return |
|---|---|---|
| float | None |
The update function of angle attribute.
VPoint.set_offset()¶
| self | offset | return |
|---|---|---|
| float | None |
The update function of slider offset. It will also enable offset value after called.
VPoint.disable_offset()¶
| self | return |
|---|---|
| None |
Disable offset setting of the joint.
VPoint.distance()¶
| self | p | return |
|---|---|---|
| VPoint | float |
Return the distance between two VPoint objects.
VPoint.has_offset()¶
| self | return |
|---|---|
| bool |
Return True if the offset setting is enabled.
VPoint.offset()¶
| self | return |
|---|---|
| float |
Return the offset constraint value of the joint.
VPoint.true_offset()¶
| self | return |
|---|---|
| float |
Return the current offset value of the joint.
VPoint.slope_angle()¶
| self | p | num1 | num2 | return |
|---|---|---|---|---|
| VPoint | int | int | float | |
| 2 | 2 |
Return the value hypot(p_x - m_x, p_y - m_y),
where m_x, m_y is the value of the joint,
and p_x, p_y is the value of p.
The option num1 and num2 is the position of current coordinate attribute.
VPoint.grounded()¶
| self | return |
|---|---|
| bool |
Return True if the joint is connected to ground link.
VPoint.pin_grounded()¶
| self | return |
|---|---|
| bool |
Return True if the joint pin is connected to ground link.
VPoint.same_link()¶
| self | return |
|---|---|
| bool |
Return True if the point is at the same link.
VPoint.no_link()¶
| self | return |
|---|---|
| bool |
Return True if there is no any link in links attribute.
VPoint.is_slot_link()¶
| self | link_name | return |
|---|---|---|
| str | bool |
Return True if the slot is on the link link_name.
VPoint.expr()¶
| self | return |
|---|---|
| str |
Return the literal mechanism expression of the joint.
VPoint.__getitem__()¶
| self | i | return |
|---|---|---|
| int | float |
Implement x, y = self or x = self[0] in Python script.
VPoint.__repr__()¶
| self | return |
|---|---|
| str |
Over loaded method to print the objects.
VLink¶
| type | inherit |
|---|---|
| type | object |
Mechanism expression class in link’s view.
Class attributes of VLink¶
| name | type | description |
|---|---|---|
| HOLDER | VLink | A placeholder of VLink type. |
| FRAME | str | The name of frame. (“ground”) |
Object attributes of VLink¶
| name | type | description |
|---|---|---|
| name | str | The name tag of the link. |
| color | Optional[Tuple[int, int, int]] | The RGB color data of the joint. |
| color_str | str | The color string of the joint. |
| points | Sequence[int] | The points of the link. |
VLink.__init__()¶
| self | name | color_str | points | color_func | return |
|---|---|---|---|---|---|
| str | str | Iterable[int] | Optional[Callable[[str], Tuple[int, int, int]]] | None | |
| None |
The attributes will match to the object attributes of VLink objects.
Where the color function color_func needs to transform the color string color_str into RGB format.
If color information is not needed, the color_func can be None.
VLink.set_points()¶
| self | points | return |
|---|---|---|
| Iterable[int] | None |
The update function of points attribute.
VLink.__contains__()¶
| self | point | return |
|---|---|---|
| int | bool |
Implement point in self in Python script.
Return True if point is in the points attribute.
VLink.__repr__()¶
| self | return |
|---|---|
| str |
Over loaded method to print the objects.
Module expression_parser¶
color_names¶
| type |
|---|
| Tuple[str, …] |
The object contains all of supported colors in string format.
color_rgb()¶
| name | return |
|---|---|
| str | Tuple[int, int, int] |
Get RGB color data by name, return (0, 0, 0) if it is invalid.
Also support "(R, G, B)" string format.
parse_params()¶
| expr | return |
|---|---|
| str | List[List[Union[str, float]]] |
Parse mechanism expression into VPoint constructor arguments.
parse_pos()¶
| expr | return |
|---|---|
| str | List[Tuple[float, float]] |
Parse mechanism expression into coordinates.
parse_vpoints()¶
| expr | return |
|---|---|
| str | List[VPoint] |
Parse mechanism expression into VPoint objects.
parse_vlinks()¶
| expr | return |
|---|---|
| str | List[VLink] |
Parse mechanism expression into VLink objects.
edges_view()¶
| graph | return |
|---|---|
| Graph | Iterator[Tuple[int, Tuple[int, int]]] |
The iterator will yield the sorted edges from graph.
graph2vpoints()¶
| graph | pos | cus | same | grounded | return |
|---|---|---|---|---|---|
| Graph | Dict[int, Tuple[float, float]] | Optional[Dict[int, int]] | Optional[Dict[int, int]] | Optional[int] | List[VPoint] |
| None | None | None |
Transform graph into VPoint objects. The vertices are mapped to links.
pos: Position for each vertices.cus: Extra points on the specific links.same: Multiple joint setting. The joints are according toedges_view.grounded: The ground link of vertices.
Module graph¶
link_assortment()¶
| g | return |
|---|---|
| Graph | List[int] |
Return link assortment of the graph.
contracted_link_assortment()¶
| g | return |
|---|---|
| Graph | List[int] |
Return contracted link assortment of the graph.
labeled_enumerate()¶
| g | return |
|---|---|
| Graph | List[Tuple[int, Graph]] |
Enumerate each node with labeled except isomorphism.
Graph¶
| type | inherit |
|---|---|
| type | object |
The undirected graph class, support multigraph.
Object attributes of Graph¶
| name | type | description |
|---|---|---|
| edges | Tuple[Tuple[int, int], …] | The edges of the graph. |
| vertices | Tuple[int, …] | The vertices of the graph. |
Graph.__init__()¶
| self | edges | return |
|---|---|---|
| Iterable[Tuple[int, int]] | None |
Input edges of the graph. The vertices symbols are positive continuously integer.
Graph.add_edge()¶
| self | n1 | n2 | return |
|---|---|---|---|
| int | int | None |
Add edge n1 to n2.
Graph.add_vertices()¶
| self | vertices | return |
|---|---|---|
| Iterable[int] | None |
Add vertices from iterable object vertices.
Graph.dof()¶
| self | return |
|---|---|
| int |
Return DOF of the graph.
Note
DOF is the Degree of Freedoms to a mechanism.
In the Graph objects, all vertices will assumed as revolut joints (1 DOF).
Graph.neighbors()¶
| self | n | return |
|---|---|---|
| int | Tuple[int, …] |
Return the neighbors of the vertex n.
Graph.degrees()¶
| self | return |
|---|---|
| Dict[int, int] |
Return the degrees of each vertex.
Graph.degree_code()¶
| self | return |
|---|---|
| int |
Generate a degree code.
With a sorted vertices mapping by the degrees of each vertex, regenerate a new adjacency matrix. A binary code can be found by concatenating the upper right elements. The degree code is the maximum value of the permutation.
Graph.adjacency_matrix()¶
| self | return |
|---|---|
| ndarray |
Generate a adjacency matrix.
Assume the matrix A[i, j] = A[j, i].
Where A[i, j] = 1 if edge (i, j) exist.
Graph.is_connected()¶
| self | without | return |
|---|---|---|
| int | bool | |
| -1 |
Return True if the graph is connected.
Set the argument without to ignore one vertex.
Graph.has_cut_link()¶
| self | return |
|---|---|
| bool |
Return True if the graph has cut-link.
Graph.is_degenerate()¶
| self | return |
|---|---|
| bool |
Return True if the graph is degenerate.
Graph.is_isomorphic()¶
| self | graph | return |
|---|---|---|
| Graph | bool |
Return True if the graph is isomorphic to graph.
Default is using VF2 algorithm.
Graph.is_isomorphic_vf2()¶
| self | graph | return |
|---|---|---|
| Graph | bool |
Return True if the graph is isomorphic to graph.
Compare with VF2 algorithm, one of the high performance isomorphic algorithms.
Graph.is_isomorphic_degree_code()¶
| self | graph | return |
|---|---|---|
| Graph | bool |
Return True if the graph is isomorphic to graph.
Compare with degree code algorithm.
Graph.duplicate()¶
| self | vertices | return |
|---|---|---|
| Iterable[int] | Graph |
Make the graph duplicate specific vertices (from vertices). Return a new graph.
Graph.copy()¶
| self | return |
|---|---|
| Graph |
The copy method of the Graph object.
Module graph_layout¶
external_loop_layout()¶
| graph | node_mode | scale | return |
|---|---|---|---|
| Graph | bool | float | Dict[int, Tuple[float, float]] |
| 1. |
Return the layout position decided by external loop.
Argument node_mode will transform edges into vertices.
Argument scale will resize the position by scale factor.
Module number¶
link_synthesis()¶
| nl | nj | stop_func | return |
|---|---|---|---|
| int | int | Optional[Callable[[], bool]] | List[Tuple[int, …]] |
| None |
Return link assortment by number of links nl and number of joints nj.
The check stop function stop_func object for GUI or subprocess,
return True to terminate this function.
contracted_link_synthesis()¶
| link_num_list | stop_func | return |
|---|---|---|
| Sequence[int] | Optional[Callable[[], bool]] | List[Tuple[int, …]] |
| None |
Return contracted link assortment by link assortment link_num_list.
The check stop function stop_func object for GUI or subprocess,
return True to terminate this function.
Module planar_check¶
is_planar()¶
| g | return |
|---|---|
| Graph | bool |
Return True if graph g is a planar graph.
Module planar_linkage¶
Planar¶
| type | inherit |
|---|---|
| type | Verification |
Planar.__init__()¶
| self | mech_params | return |
|---|---|---|
| Dict[str, Any] | None |
The constructor of verification object.
Options of mech_params:
Expression: The mechanism expression of the structure.- type: List[VPoint]
input: [Input pairs].- type: List[Tuple[int, int]]
Placement: The grounded joints setting. (x,y,r)- type: Dict[int, Tuple[float, float, float]]
Target: The target path.- type: Dict[int, Sequence[Tuple[float, float]]]
same: Multiple joint setting. The joints are according toedges_view.- type: Dict[int, int]
upper: The upper setting of variables, the length must same as variable array.- type: List[float]
lower: The lower setting of variables, the length must same as variable array.- type: List[float]
Variable array:
| Placement | Link length | Inputs | |
|---|---|---|---|
v = |
x0, y0, … |
l0, l1, … |
a00, a01, …, a10, a11, … |
In 1D array: v = [x0, y0, ..., l0, l1, ..., a00, a01, ..., a10, a11, ...]
Planar.is_two_kernel()¶
| self | return |
|---|---|
| bool |
Return True if the solving method is two kernel.
Planar.result()¶
| self | v | return |
|---|---|---|
| numpy.ndarray | str |
Input a generic data (variable array), return the mechanism expression.
Module tinycadlib¶
plap()¶
| c1 | d0 | a0 | c2 | inverse | return |
|---|---|---|---|---|---|
| Coordinate | float | float | Optional[Coordinate] | bool | Coordinate |
| None | False |
The PLAP function requires two points, one distance and one angle, obtained the position of thrid point.
The unit of a0 is degree.
In the following picture, c1 correspond to “A”, c2 correspond to “B”, d0 correspond to “L0”,
a0 correspond to “beta”, return correspond to “C”. If c2 is not given, “alpha” will be set to zero.
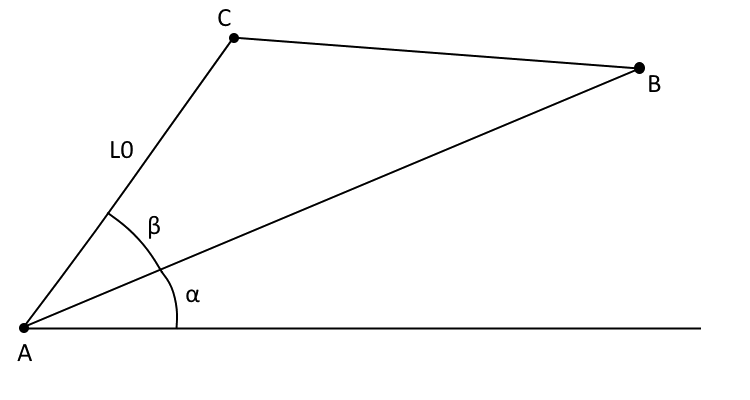
Set inverse option to True can make a0 value as negative.
pllp()¶
| c1 | d0 | d1 | c2 | inverse | return |
|---|---|---|---|---|---|
| Coordinate | float | float | Coordinate | bool | Coordinate |
| False |
The PLLP function requires two points and two distances, obtained the position of thrid point.
In the following picture, c1 correspond to “A”, c2 correspond to “B”, d0 correspond to “L0”,
d1 correspond to “L1”, return correspond to “C”.
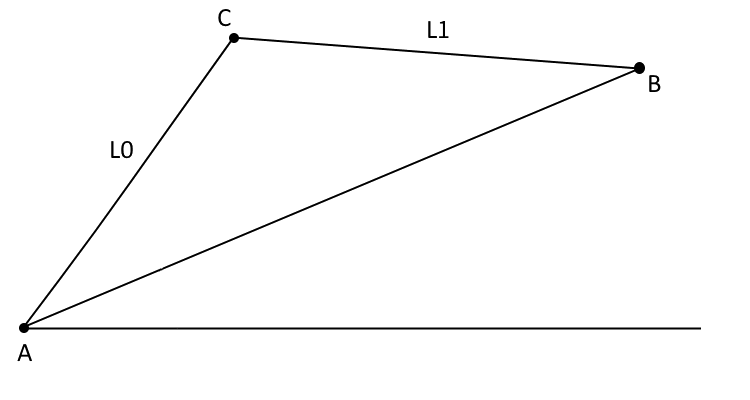
Set inverse option to True can make the result upside down.
plpp()¶
| c1 | d0 | c2 | c3 | inverse | return |
|---|---|---|---|---|---|
| Coordinate | float | Coordinate | Coordinate | bool | Coordinate |
| False |
The PLLP function requires three points and one distance, obtained the position of fourth point.
In the following picture, c1 correspond to “A”, c2 correspond to “B”, c3 correspond to “C”,
d0 correspond to “L0”, return correspond to “D”.
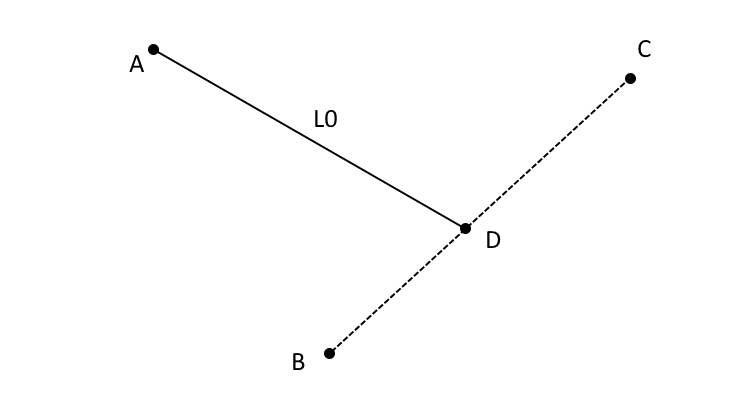
Set inverse option to True can make the result to the another side between c1 and line c2 c3.
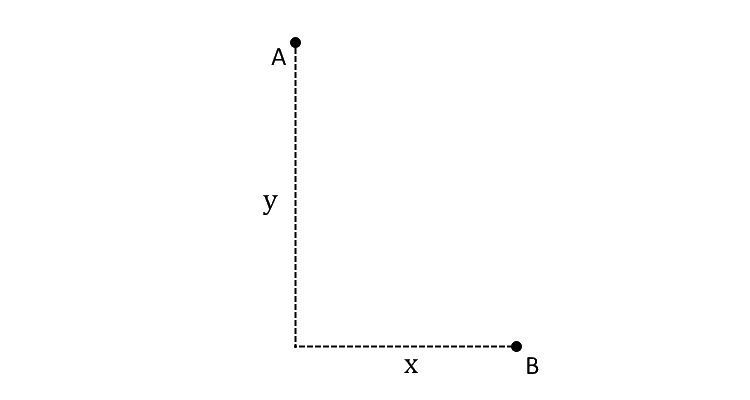
pxy()¶
| c1 | d0 | d1 | return |
|---|---|---|---|
| Coordinate | float | float | Coordinate |
The PXY function requires one point and offset values, obtained the position of second point.
In the following picture, c1 correspond to “A”, d0 correspond to “X”,
d1 correspond to “Y”, return correspond to “B”, the sign of value are correspond to coordinate system.
vpoint_dof()¶
| vpoints | return |
|---|---|
| Sequence[VPoint] | int |
Return the DOF of the mechanism expression vpoints.
expr_parser()¶
| exprs | data_dict | return |
|---|---|---|
| Sequence[Tuple[str, …]] | Dict[str, float] | None |
Solve and update information of the triangle expression exprs to data_dict.
The argument exprs can be obtained by vpoints_configure and ExpressionStack.as_list() method.
This function is already included in expr_solving, not recommended for direct use.
data_collecting()¶
| exprs | mapping | vpoints_ | return |
|---|---|---|---|
| ExpressionStack | Dict[int, str] | Sequence[VPoint] | Tuple[Dict[str, Union[Coordinate, float]], int] |
Data transform function of Triangular method.
The triangle expression stack expr is generated from vpoints_configure.
The information data mapping map the symbols to the indicator of vpoints_.
This function is already included in expr_solving, not recommended for direct use.
expr_solving()¶
| exprs | mapping | vpoints | angles | return |
|---|---|---|---|---|
| ExpressionStack | Dict[Union[int, Tuple[int, int]], Union[str, float]] | Sequence[VPoint] | Optional[Sequence[float]] | List[Union[Tuple[float, float], Tuple[Tuple[float, float], Tuple[float, float]]]] |
| None |
Solver function of Triangular method and BFGS method, for mechanism expression vpoints.
The triangle expression stack expr is generated from vpoints_configure.
The information data mapping map the symbols to the indicator of vpoints,
additionally has a same format as argument data_dict in SolverSystem.
Solver function will not handle slider input pairs in argument angles, which is only support revolut joints.
In another way, the slider input pairs can be set by VPoint.disable_offset() method.
Module triangulation¶
ExpressionStack¶
| type | inherit |
|---|---|
| type | object |
Triangle solution stack, generated from vpoints_configure.
It is pointless to call the constructor.
ExpressionStack.as_list()¶
| self | return |
|---|---|
| List[Tuple[str, …]] |
Copy the dataset as list object.
ExpressionStack.__repr__()¶
| self | return |
|---|---|
| str |
Over loaded method to print the objects.
vpoints_configure()¶
| vpoints_ | inputs | status | return |
|---|---|---|---|
| Sequence[VPoint] | Sequence[Tuple[int, int]] | Optional[Dict[int, bool]] | ExpressionStack |
| None |
Generate the Triangle solution stack by mechanism expression vpoints_.
The argument inputs is a list of input pairs.
The argument status will track the configuration of each point, which is optional.
Module verify¶
Verification¶
| type | inherit |
|---|---|
| type | object |
Verification function base class. It is used to build the verification function for Metaheuristic Random Algorithms. See the sections of Adesign API.
Verification.fitness()¶
Cython cdef method
@abstractmethod
| self | v | return |
|---|---|---|
| numpy.ndarray | double |
Return the fitness from the variable list v.
This function will be directly called in the algorithms.
Verification.result()¶
@abstractmethod
| self | v | return |
|---|---|---|
| numpy.ndarray | Any |
Return the result from the variable list v.
AlgorithmBase¶
| type | inherit |
|---|---|
| type | object |
Algorithm base class. It is used to build the Metaheuristic Random Algorithms. See the sections of Adesign API.
AlgorithmBase.__init__()¶
| self | func | settings | progress_fun | interrupt_fun | return |
|---|---|---|---|---|---|
| Verification | Dict[str, Any] | Optional[Callable[[int, str], None]] | Optional[Callable[[], bool]] | None | |
| None | None |
The argument func is a object inherit from Verification,
and all abstract methods should be implemented.
The format of argument settings can be customized.
The argument progress_fun will be called when update progress,
and the argument interrupt_fun will check the interrupt status from GUI or subprocess.
AlgorithmBase.run()¶
| self | return |
|---|---|
| Tuple[Any, List[Tuple[int, float, float]]] |
Run and return the result and convergence history.
The first place of return is came from calling Verification.result().
The second place of return is a list of generation data,
which type is Tuple[int, float, float]].
The first of them is generation,
the second is fitness, and the last one is time in second.